Специалисты Тихоокеанского филиала ГНЦ РФ ФГБНУ «ВНИРО» («ТИНРО») прошли курсы подготовки операторов телеуправляемых необитаемых подводных аппаратов (ТНПА, или ROV – Remotely Operated Vehicle)
в МГУ им. адм. Г.И. Невельского.
На протяжении двух недель Евгений Кушнир (ведущий специалист Группы оценки воздействия на ВБР отдела перспективных разработок и экспертизы) и Сергей Нужденко (ведущий специалист Лаборатории бентоса)
изучали теоретический курс по подводной робототехнике и отрабатывали базовые навыки,
операции с аппаратами сначала в тренировочном бассейне, а потом – в открытой части Амурского залива.
Подводный аппарат, которым управляет оператор с надводного судна, используется для подводных работ. Сигналы, показания датчиков и камеры передаются посредством оптоволоконного кабеля.
Гидроакустическое, световое оборудование, манипуляторы, подводные инструменты, другие устройства ТНПА существенно расширяют сферу его применения.
В ТИНРО и ранее использовались ТНПА, преимущественно Лабораторией бентоса.
Теперь специалистов, владеющих навыками пилотирования ТНПА, стало больше.
Отраслевая наука рассматривает телеуправляемые необитаемые подводные аппараты как дополнительное средство для изучения подводной биоты, состояния среды, уточнения состояния запасов донных гидробионтов для пассивных орудий лова.
В качестве перспективы − определение численности глубоководных донных и придонных видов, актуализация расположения участков эффективного лова донных объектов с учетом изменения параметров окружающей среды.
Курсы пилотов ТНПА состояли из теоретической и практическойподготовки.
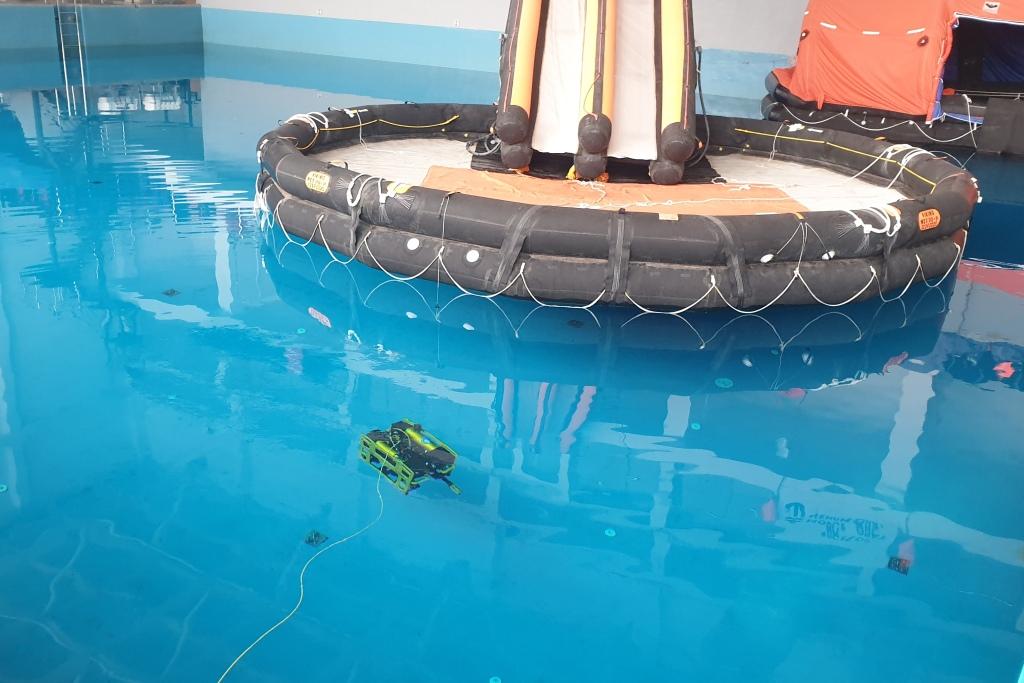
Начальная отработка навыков пилотирования происходила в бассейне. Такая методика позволила получить представление о принципах и основах движения ТНПА, обеспечила уверенный переход к работе на открытой воде. Бассейн оснащен системой, позволяющей имитировать штормовые условия за счёт работы штормового ветрогенератора, волногенератора, создающих ветер, дождь и волну до 1,1 м. Этот опыт необходим, чтобы в реальных условиях, с учётом течений эффективно регулировать перемещение подводного аппарата для выполнения поставленных задач.
Практические работы были проведены с борта судна в бухте Федорова и открытой части Амурского залива
с использованием ТНПА RovBuilder«РБ-660». Эта отечественная модель спроектирована для максимальной глубины погружения на 300 метров, но в рамках курсов ограничились 30 м.
Как отметили сотрудники ТИНРО, процесс управления ТНПА требует максимальной сосредоточенности и вовлечённости. Вместе с тем, научившись справляться с колебаниями воды, особенностями обзора и видимости,можно заново открыть для себя мир морских глубин. За время практических запусков ТНПА на дне Амурского залива удалось зафиксировать разные виды беспозвоночных (морских звёзд и ежей), прибрежных крабов, мидий и других двустворчатых прикреплённых моллюсков.
Телеуправляемые необитаемые подводные аппараты являются инновационным средством для изучения подводной биоты и уточнения состояния запасов донных гидробионтов в труднодоступных акваториях,
в том числе в условиях высокой ледовитости Арктической зоны Российской Федерации.

Схематичный вид ТНПА

Начальная отработка навыков пилотирования происходила в бассейне МГУ им. адм. Г.И. Невельского

Бассейн оснащен системой, позволяющей имитировать штормовые условия
за счёт работы штормового ветрогенератора, волногенератора, создающих ветер, дождь и волну до 1,1 м.

Практические работы были проведены с борта судна в бухте Федорова и открытой части Амурского залива
с использованием ТНПА RovBuilder«РБ-660»




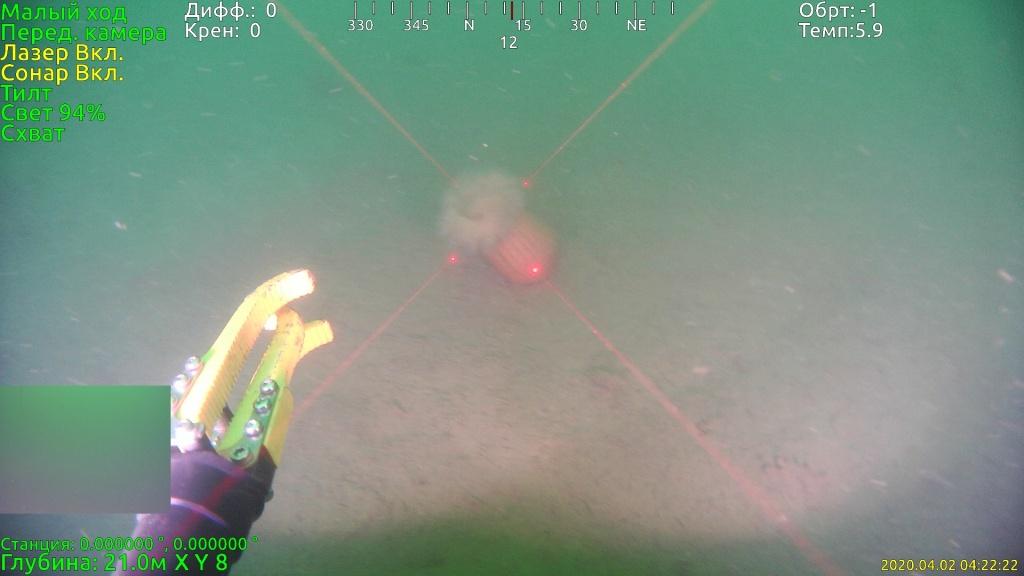
Лазерная «рамка» 10*10 см. предназначена для оценки численности донныхгидробионтов